
发布时间:2020-07-21
相机标定(Calibration),是指利用相机成像系统的数学模型,计算出世界坐标系与相机图像坐标系对应关系的过程。标定通常应用于机器视觉高精度测量系统、运动控制系统中,标定算法的稳定性及精度将直接影响测量与定位的准确性。
灵闪IntelliBlink在不断追求标定算法高速高精度的同时,又充分考虑了标定应用场景的多样性及复杂性,集成了四点标定、九点标定、网格标定、标量转换、分散型网格标定、联合标定等标定方式,帮助用户快速完成标定。
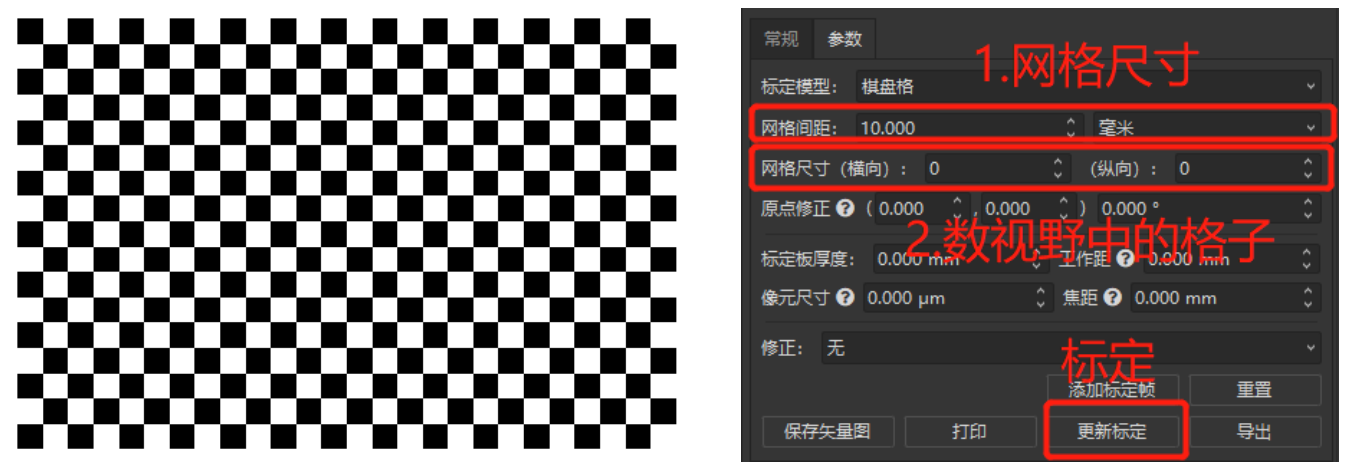
图1 传统的棋盘格标定
通过市场需求的调研,我们发现图1中传统棋盘格标定的流程比较复杂,用户除了需要知道网格的尺寸以外,还要通过数的方式确定在相机视野中的网格数量来完成标定,如果实际应用场景中网格间距尺寸比较小,用户很可能数错导致最后标定失败。

图2 分散型网格标定
在实际应用场景中,用户会遇到计算两个特征点间距的需求,但是由于特征点间距过大,精度要求过高,为了降低成本只能使用两个相机分别进行定位,然后通过数据计算给出两个特征点的实际距离,这时候必须要用到联合标定。
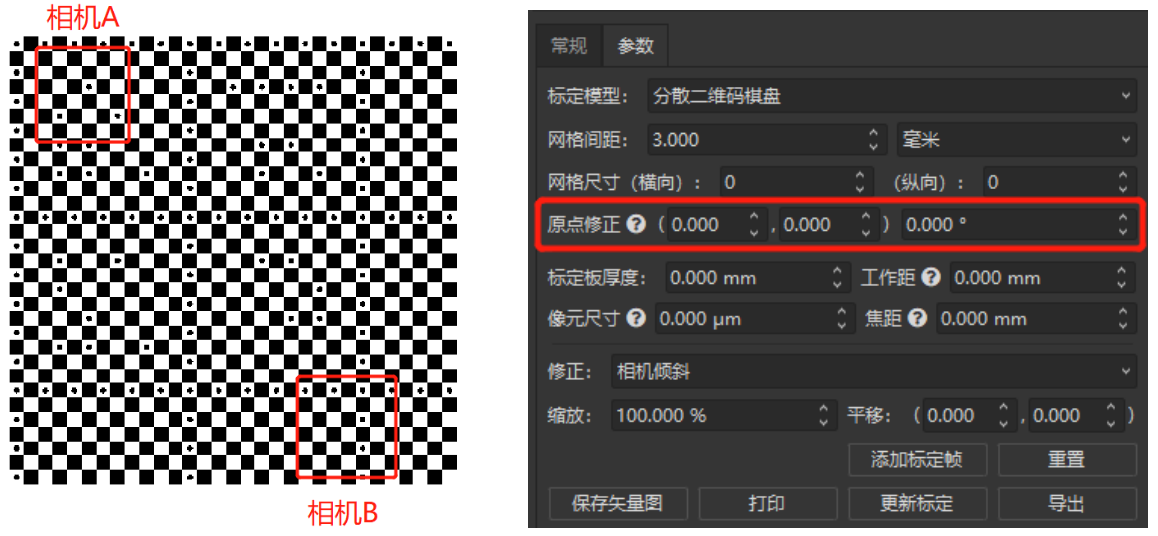
图3 联合标定
如上图所示,用户通过输入网格间距、尺寸、原点修正等信息,可以将多个相机标定在同一坐标系内,实现多个相机的联合标定,从而计算出两个相机内任意两点或者其他特征的距离。
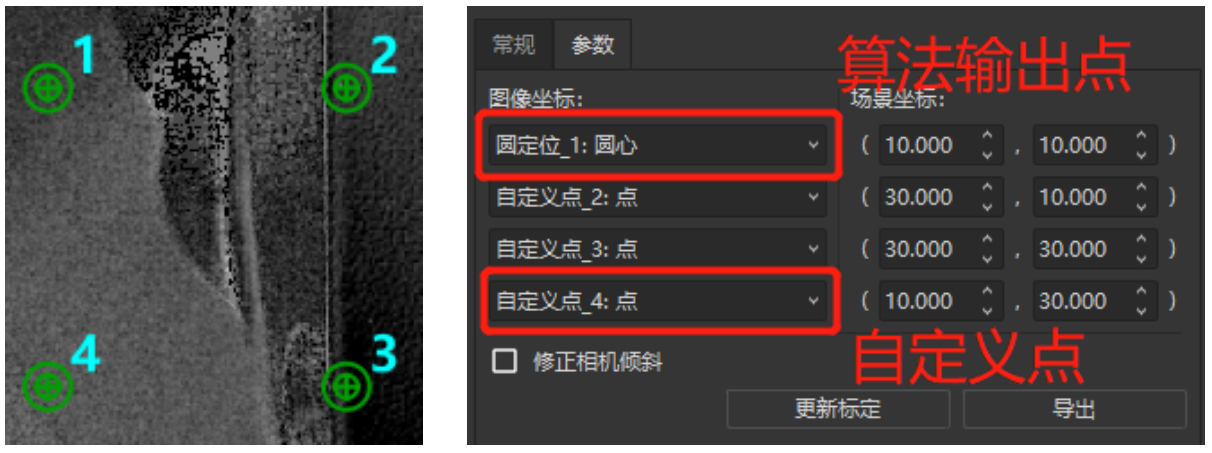
图4 多点标定
在很多尺寸测量的应用场景中,用户可以根据图像上像素的长度,对应标准产品实际的长度,直接计算出一个缩放比例关系,用户无需进行标准的标定流程。这种标定方式通常用于视觉测量的场景。
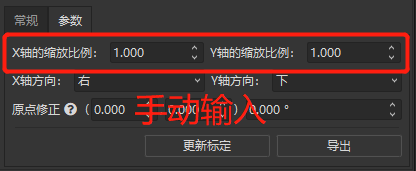

图5 标量转换标定
除此之外,相机镜头的畸变,以及现场相机安装时的倾斜,都可以通过灵闪中的矫正算法进行一键修正,降低了用户的选型与调试要求。
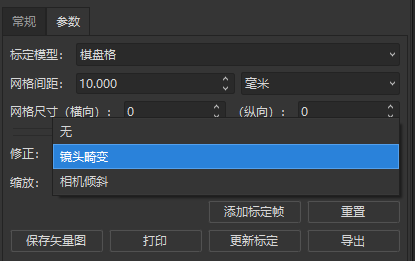
图6 矫正算法
用户可以在灵闪中根据需求输入网格尺寸,直接保存矢量图或者打印图纸。

网格打印工具
应用案例-点胶
精度要求:0.01mm
 浙公网安备 33018502001926号
浙公网安备 33018502001926号
